








Đối với việc phát triển xe không người lái thì phần mềm đóng vai trò quan trọng nhất. Nó được ví như não bộ, đảm bảo sự vận hành cho xe. Nếu trước đây, ô tô đặc trưng bởi động cơ, hộp số, bộ dẫn động, vô lăng điều khiển, xăng dầu… thì ngày nay, nó giống như một chiếc máy tính. Phần mềm và điện đã thay thế chức năng của các yếu tố cơ học, con người và nhiên liệu. Một chiếc xe hiện đại được điều khiển bởi 80 tới 100 hệ thống nhúng, 90% sáng tạo của xe hơi hiện nằm ở phần mềm, 100% xe sẽ kết nối với Cloud ( điện toán đám mây ).
Theo Sridhar Lakshmanan, một chuyên gia về xe hơi tự lái, giáo sư về kỹ thuật của trường Đại học Michigan-Dearborn, một chiếc ô tô chỉ có thể tự lái được nếu nó đáp ứng được các tiêu chuẩn sau:
Có hình dạng giống những chiếc ô tô thông thường.
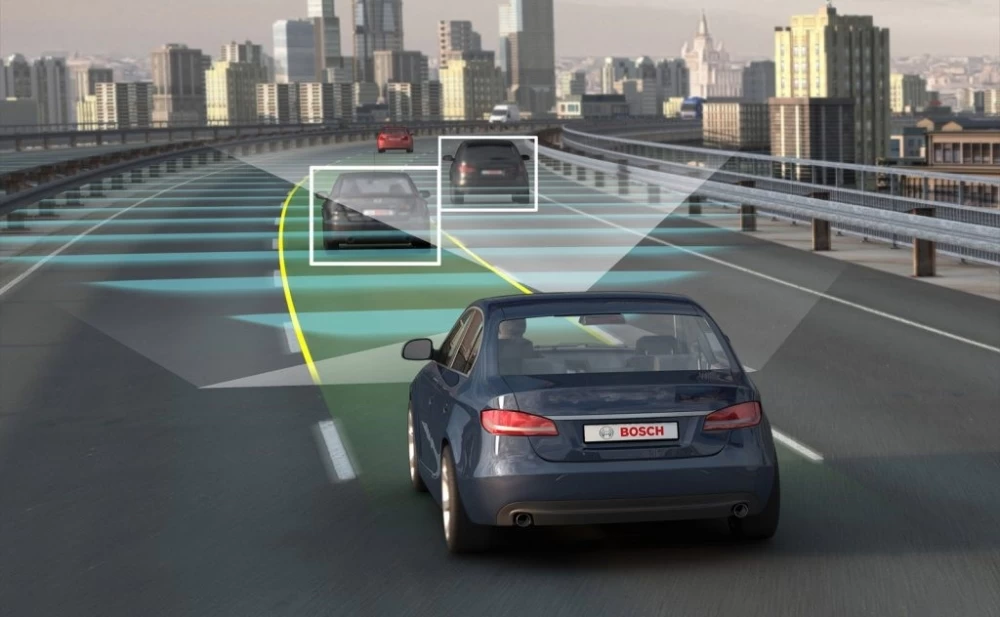
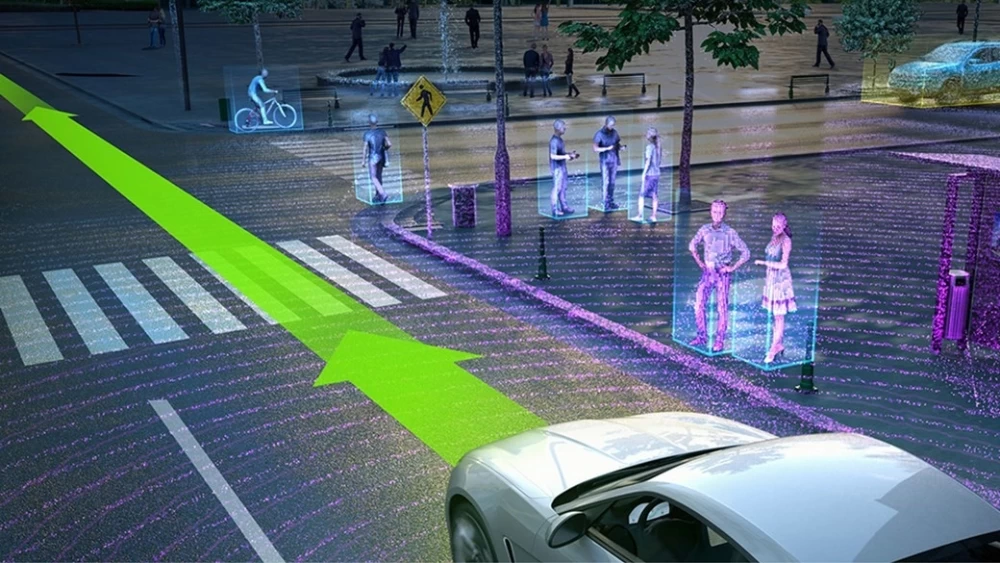
Được trang bị hệ thống nhận diện các biến động trên đường : GPS sẽ xác định nhiệm vụ của xe tự lái bằng các thiết lập điểm đầu và điểm cuối của hành trình dựa trên tính năng dẫn đường của Google Maps. Một hệ thống công nghệ hỗ trợ khác như radar, laser, camera để phát hiện và xử lý các tình huống bất ngờ. Trong đó, camera được dùng để hệ thống máy tính bên trong xe có thể nhìn thấy tình trạng xung quanh xe, còn radar sẽ giúp ô tô nhìn được đường phía trước (khoảng cách 100m), laser được dùng để quét các hiện tượng xảy ra xung quanh liên tục và gửi đến hệ thống máy tính.
Có hệ thống chuyển các thông tin từ hai hệ thống trên thành hành động thực tế trên đường.
Một hệ thống tự hành đúng nghĩa phải đáp ứng được hai yếu tố: phải xử lý khối lượng lớn dữ liệu tương tự như một chiếc máy tính; và phải thông minh như não người để thích ứng với môi trường mới lẫn cũ” theo Sridhar Lakshmanan (Đại học Michigan-Dearborn).
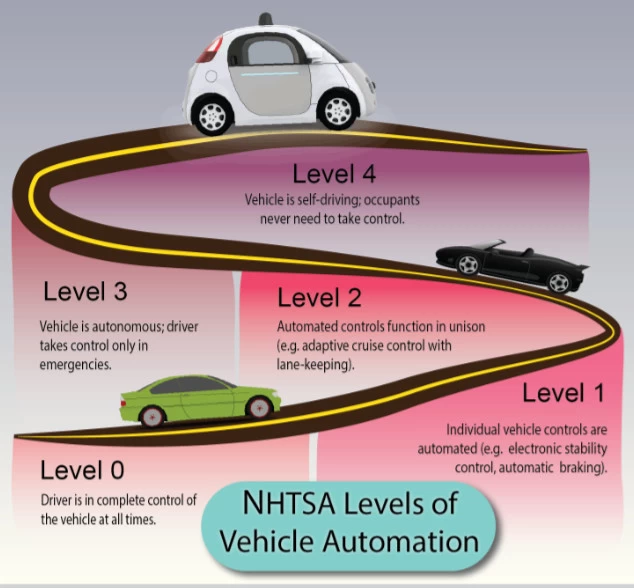
Nói một cách đơn giản, cấp độ của xe ô tô tự hành có nghĩa là một bộ hướng dẫn được xác định bởi Hiệp hội kỹ sư ô tô (SAE) để mô tả các mức độ tự chủ ( tự động hóa các hành động ) khác nhau trong những chiếc xe không người lái. Trong đó cấp cơ bản nhất là 1 và cấp độ 5 là cấp độ có thể tạm gọi là cao nhất.

Cấp độ 1 là loại cơ bản nhất, có nghĩa là các yếu tố của quá trình lái xe được thực hiện một cách cô lập, sử dụng dữ liệu từ các cảm biến và máy ảnh, người lái xe vẫn chịu phần lớn trách nhiệm điều khiển. Điều này bắt đầu vào cuối những năm 1990 tại Mercedes-Benz, với hệ thống kiểm soát hành trình tiên phong được quản lý bằng radar, trong khi Honda giới thiệu hỗ trợ giữ làn đường trên Legend 2008. Đây là những bước đầu tiên để loại bỏ nhiệm vụ của người lái xe phía sau tay lái. Bao gồm: Hỗ trợ giữ làn đường, kiểm soát hành trình tự động.